Build HAT¶
Library¶
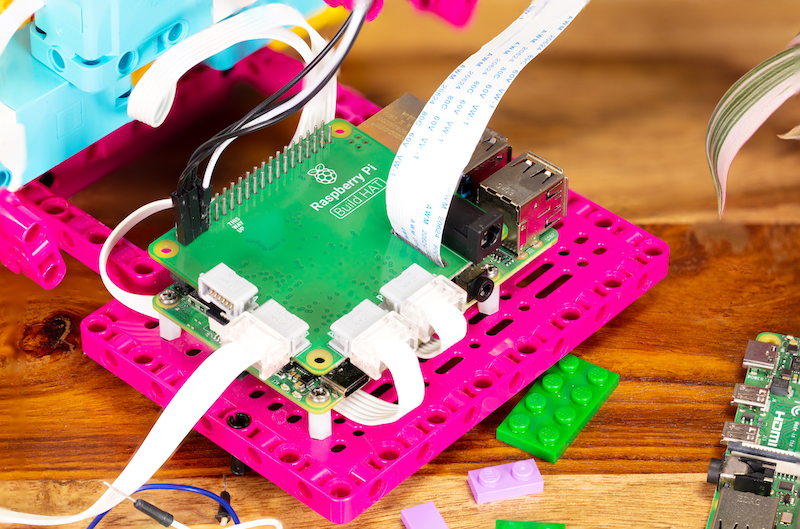
The Build HAT library has been created to support the Raspberry Pi Build HAT, an add-on board for the Raspberry Pi computer, which allows control of up to four LEGO® TECHNIC™ motors and sensors included in the SPIKE™ Portfolio.
Other LEGO® devices may be supported if they use the PoweredUp connector:
In order to drive motors, your Raspberry Pi and Build HAT will need an external 7.5V power supply. For best results, use the official Raspberry Pi Build HAT power supply.
It is now possible to use custom firmware with the library. To do this you can follow the steps below.
sudo apt install cmake python3 build-essential gcc-arm-none-eabi libnewlib-arm-none-eabi libstdc++-arm-none-eabi-newlib
git clone https://github.com/raspberrypi/pico-sdk.git --recursive
git clone https://github.com/raspberrypi/buildhat.git --recursive
cd buildhat
export PICO_SDK_PATH="$(pwd)/../pico-sdk/"
make
cd ..
mkdir test
cd test
mkdir data
cp ../buildhat/firmware-pico/build/main.bin data/firmware.bin
cp ../buildhat/bhbl-pico/signature.bin data/signature.bin
cat ../buildhat/firmware-pico/version.h | sed 's/#define FWVERSION "//g; s/ .*//g' > data/version
Then place your script, such as the following, within the test/ directory.
import time
from buildhat import Motor
m = Motor('A')
m.start()
time.sleep(5)
Then use: python test.py in the test directory, to run your script with your custom firmware.
Note if you want python to always reload the firmware from your data/ directory each time you run your script, simply write the value: -1 to data/version.
Warning
The API for the Build HAT is undergoing active development and is subject to change.